معرفی قطعات صنعتی (از وبلاگ مهندس برتر)
دیفرانسیل:
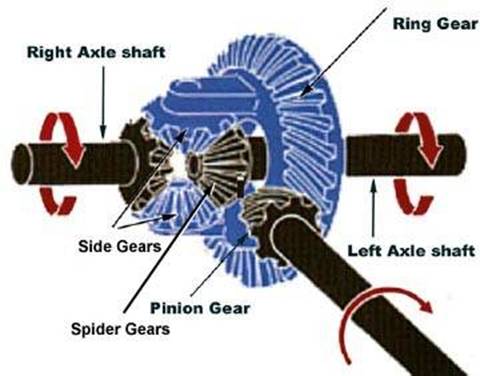
دیفرانسیل یکی از اعضای سیستم انتقال قدرت می باشد دیفرانسیل بعد از میل گاردان قرارمی گیرد البته در صورتی که خودرو دارای میل گاردان باشد اگر خودرو دارای میل گاردان نباشد دیفرانسیل بعد از گیربکس قرار خواهد گرفت و بعد از دیفرانسیل پلوس ها قرار دارند زمانی که یک اتومبیل دور میزند باید چرخی از ان که در طرف خارج پیچ است با سرعت بیشتری نسبت به چرخ دیگر بچرخد اگر بخواهیم بدون ترمز گرفتن بچرخیم و همچنین هنگامی که یک چرخاز روی یک برجستگی عبور می کند باید از چرخ دیگر تندتر بچرخد دیفرانسیل این عمل را امکان پذیرمی کند دیفرانسیل دستگاهی است که نیروی حاصله از موتور را موقعی که وسیله نقلیه به طورمستقیم و در سطح صاف حرکت می کند به طور مساوی بین چرخ های عقب تقسیم می کند ولی موقع دور زدن و یا چپ و راست رفتن و هنگام گردش ها یا در دست انداز نیروی موتور را به نسبت احتیاج بین چرخ های عقب تقسیم می نماید قطعات دیفرانسیل در داخل پوسته یا محفظه ای که معمولا ان را کله گاوی می گویند قرار دارند در داخل این جعبه که دنده کرانویل و دنده پینیون و چهارهرز گرد کوچک و شش عدد بلبرینگ و دو دنده سر پلوس چرخ ها قرار گرفته اند به طور خلاصه می توان گفت که نیروی موتور به وسیله کلاچ به جعبه دنده و از گیربکس توسط میل گاردان به دیفرانسیل و از دیفرانسیل به پلوس چرخ ها منتقل و چرخ ها به حرکت در می ایند با گردش میلگاردان دنده پینیون هم می چرخد و چون دنده کرانویل با دنده پینیون درگیر است کرانویل را به حرکت در می اورد و به همراه خود هرز گردها را هم می چرخاند اگر چرخ های اتومبیل در سطح صاف حرکت کنند دنده هرز گرد با دنده های پلوس حرکت و چرخشی ندارد ولی اگر چرخ ها هماهنگی نداشته باشد و اتومبیل در حال دور زدن باشد باید یک چرخ که در زاویه تنگ قرار گرفته است اهسته گردش نماید در این موقع دنده های هرز گرد بر خلاف دنده های پلوس به حرکت در ایند و سبب سریع تر گردانیدن یکی از دنده های پلوس می شوند (چرخی که مقاومتکمتری را تحمل می کند)دنده های هرز گرد که تعداد انها دو یا چهار عدد می باشد نقش مهمی در دیفرانسیل دارند کار انها تنظیم دور چرخ در سر پیچ ها می باشد
وظیفه دیفرانسیل عبارتند از:
1- 90 درجه تغییر جهت گردش گاردان 2- ازدیاد گشتاور 3- تعدیل دور چرخ های عقب هنگام دور
زدن یا حرکت در میدان به این معنی که هنگامی که اتومبیل در میدان حرکت می کند چرخ سمت داخل میدان دایره کوچکتری را طی می کند در صورتی که چرخ سمت خارج میدان دایره بزرگ تری را طی می کند نتیجه اینکه یک چرخ خارجی دور بیشتر و چرخ داخلی دور کمتری می زند امکان این تغییر دور وظیفه چرخ دنده های داخلی دیفرانسیل می باشد مثال دیگر هنگامی که چرخ اتومبیل داخل جوی اب یا جدول گیر می کند در صورت حرکت چرخ ها چرخ داخل چاله ثابت ولی چرخ دیگر به سرعت حرکت می کند دیفرانسیل اتومبیل های سواری را به صورت یک پارچه و مفصلی می سازند که نوع یک پارچه ان مثل پیکان و نوع مفصلی ان مثل بنز و بی ام و را میتوان نام برد ولی همگی تقریبا دارای قطعات مشابه یکدیگر می سازند
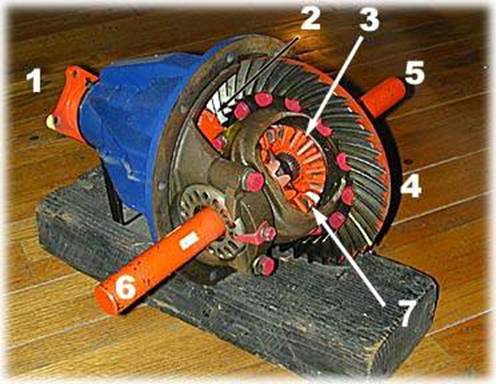
هوزینگ در دیفرانسیل (کله گاوی)
وظیفه اصلی هوزینگ و چرخ دنده داخلی ان تعدیل یا تنظیم دور چرخ ها هنگام دور زدن یا حرکت در میدان ها می باشدهنگامی که اتومبیل به طور مستقیم حرکت می کند چرخ ها چه محرک چه متحرک با دور مساوی دوران می کنند ولی هنگامی که در میدان ها یا مسیر های منحنی شکل چرخ های قوس خارجی میدان مسافت بیشتری طی می کنند و چرخ های قوس داخلی میدان مسافت کمتری را طی می کنند هرگاه هر دو چرخ به کمک یک محور به یکدیگر متصل بودند چرخ ها هنگام دور زدن روی زمین کشیده می شوند و سایش زیاد لاستیک و انحراف اتومبیل حتمی خواهد بود به همین دلیل محور محرک را به دو قسمت تقسیم کرده و هر یک را پلوس می نامند بدین ترتیب گردش نامساوی چرخ ها محرک امکان پذیر میشود برای این که بتوان هر دو پلوس را به کمک یک گاردان به حرکت دراورد انها را به کمک "جعبه هوزینگ"به یکدیگر متصل می کنند در دیفرانسیل پینیون کرانویل را بهحرکت در می اورد و بدین ترتیب "هوزینگ" که به کرانویل متصل است به حرکت در می اید در انتهای هر پلوسیک چرخ دنده مخروطی به نام دنده پلوس در جعبه هوزینگ قرار دارد که این دندهها به کمک دو دنده دیگر که انها را دنده هرز گرد (ساتلیت) می گویند به یگدیگر مربوط می سازد دنده های هرز گرد روی محور خود ازاد هستند و می توانند درمواقع لزوم حول ان دوران نمایند مسیرانتقال نیرو از جمله هوزینگ به محور دنده ها هرز گرد و از انها به دنده های پلوس و بالاخره به پلوس ها و چرخ صورت می گیرد هنگام حرکت مستقیم پلوس ها ودر نتیجه هر دو چرخ دارای دور یکسانهستند هرز گردها حول خود دوران ندارند و همراه جعبه هوزینگ به حرکت گردشی خود ادامه می دهند و عمل اتصال بین پلوس ها جعبه دنده هوزینگ به حرکت گردشی خود ادامه می دهند و عمل اتصال بین پلوس و جعبه هوزینگ انجام می دهند و در نتیجه فقط انتقال نیرو به دنده پلوس را انجام می دهند
1- هوزینگ 2- واشر مسی 3- دنده پلوس 4- هرز گرد 5- دنده پلوس 6- کرانویل
هنگام طی مسیر منحنی یا دور زدن چرخ داخلی چون مسیر کوتاه تری را طی می کند باید دور کمتری نسبت به چرخ خارجی بزند در این حال هرز گرد مربوط به دنده پلوس چون نمی تواند تمامی دنده را دور جعبه دنده هوزینگ منتقل کند سرعتش کم می شود و در نتیجه روی ان لغزیده و بنابراین حول محور خود به دوران در می ایند این حرکتاضافی به دنده پلوس دیگر منتقل شده و انرا با دور بیشتری می گرداند چرخ خارجی دور بیشتری و مسافت بیشتری را طی می کند دنده هرز گردتنها هنگامی طی مسیرهای منحنی یا دور زدن عمل نمی کند بلکه در مواقعی که بهنحوی اصطکاک بین دو چرخ متفاوت باشد یا بار یکی از لاستیکها از دیگری کمتر باشد وارد عمل می گردد هرگاه مثلا چرخی در سطح متفاوت زمین یخ زده قرار گیرد و چرخ دیگر در سطح خشک دراین حال چرخ با اصطکاک کم تا دو برابر دور جعبه هوزینگ می گردد در حالی که چرخ دیگر حرکتی ندارد و در این حال وسیله نقلیه قدرت حرکت را نخواهد داشت زیرا نیروی اصطکاک موجود در چرخ در حال بکسواد کافی برای اتومبیل نیست برای این گونه موارد در بعضی از وسایل نقلیه سنگین ازقفل کن دیفرانسیل استفاده می کنند قفل کن دیفرانسیل دو پلوس را با یکدیگر یک پارچه می کند واتومبیل را در مکان برفی و غیره ممکن می سازد .

میل لنگ:
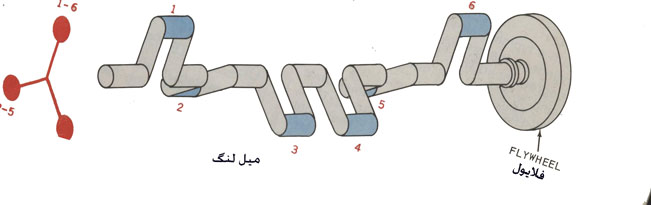
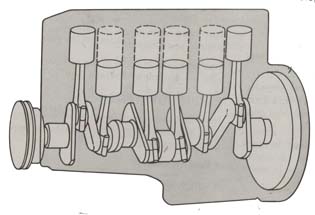
میل لنگ دارای شکل فضایی خاصی است که با توجه به تعداد لنگهایش با یکدیگر تفاوت میکنند. سادهترین میللنگ ، میللنگ یک موتور تک سیلندر است. که دارای یک لنگ در وسط و دو تکیه گاه در طرفین است.
ریشه لغوی
میل لنگ یک کلمه فارسی است و بیانگر میلهای است که از حالت ضخیم خارج شده است. معنای کاربردی میل لنگ عبارتست از یکی از قطعات موتور که باعث می شود قدرت چرخشی تولید شود.
مقدمه
برای آنکه تصوری از شکل فضایی میل لنگ داشته باشید. یک فیلتر دستی را تصور کنید. که قسمت دستگیره آن همان لنگ و طرفین آن (که در یک راستا قرار داند) تکیه گاههای میل لنگ میباشند. تعداد لنگهای میل لنگ متناسب با تعداد سیلندرهای یک موتور است. بدین شکل که پیستون قرار گرفته در داخل هر سیلندر به یکی از لنگهای میل لنگ متصل میگردد. البته این حالت در موتورهای پیستونی که سیلندرهای آنها به شکل ردیفی قرار گرفتهاند صادق است. <br><br>در موتورهای پیستونی V شکل (موتورهای خورجینی) تعداد لنگهای میل لنگ معمولا 2/1 تعداد سیلندرهای موتور است. و به هر لنگ دو پیستون متصل میگردد. هدف از استفاده از میل لنگ در موتور اینست که حرکت دورانی تولید گردد. برای مثال همان فیلتر دستی را در نظر بگیرید. در حالیکه که دستگیره فیلتر با استفاده از دست چرخانده میشود. در این حالت دستگیره یک مسیر دایرهای شکل طی میکند. در حالیکه نوک متر در سر جایش در محل ایجاد سوراخ باقی مانده است و تنها در آنجا چرخش میکند (دستگیره بر روی محیط دایره سیر میکند و نوک متر در مرکز دایره قرار دارد.). <br><br>در موتورهای پیستونی میتوان نیروی پیستون را به نیروی دست تشبیه کرد که باعث به حرکت در آوردن قسمت لنگ میشود (البته اینکار به کمک شاتون انجام میپذیرد). هر چند که حرکت پیستون به شکل رفت و برگشتی است، لیکن به علت چرخش قسمت لنگ در میان سر بزرگ شاتون این حرکت به شکل چرخشی در میآید و در نهایت ما چرخش مطلوب خوبی را از سر میل لنگ میگیریم که میتوان آنرا به نوک فیلتر تشبیه کرد.
ساختمان میل لنگ
اغلب میل لنگها از جنس فولاد با کربن متوسط یا آلیاژ فولاد در ترکیب با فلزات کروم و نیکل و به رویش آهنگریساخته میشود. البته در تعداد معدودی از موتورهای چند سیلندره که با دورهای بالا کار میکند میل لنگ را با استفاده از روش ریخته گری میسازند که در مواد آن نسبتا مقادیر زیادی از کربن و مس را بکار میبرند. اجزای میل لنگ از محورهای اصلی ، لنگها یا محورهای اصلی لنگ ، بازوهای لنگ ، و وزنههای تعادل تشکیل شده است.
لنگها
لنگها قسمتهایی از میل لنگ میباشند که بر روی خط محور اصلی میل لنگ قرار نگرفتهاند (مثل دستگیره چتر) و انتهای بزگ شاتون به آنها متصل میگردد. تعداد لنگها در موتورهای ردیفی برابر با تعداد سیلندرهای و در موتورهای V شکل نصف تعداد سیلندرها است.
محورهای اصلی
محورهایی از میل لنگ میباشد که با خط محوری اصلی میل لنگ هم مرکز میباشند این محورها در محفظه میل لنگ درون یا تاقانونهای ثابت قرار گرفته و با اتکا به آنها میچرخند هر یاتاقان ثابت از دو نیمه یا تاقان تشکیل شده است. که نیمه بالایی آن که نیمه ثابت نامیده میشود. با بدنه موتور و در محفظه میل لنگ بصورتیکپارچه ریخته گری شده است و نیمه پایینی بوسیله دو عدد پیچ و مهره در نیمه بالایی متصل میگردد. غالبا تعداد محورهای اصلی میل لنگ در موتورهای مختلف (حتی با تعداد سیلندرهای برابر) فرق میکند.
بازوهای لنگ
قسمتهایی از میل لنگ میباشند که محورهای اصلی میل لنگ را به لنگها وصل میکنند البته بازوهای لنگ با وزنههای تعادل (که در پی خواهد آمد) بصورت یکپارچه هستند.
وزنههای تعادل
در وزنههای تعادل به منظور ایجاد تعادل در برابر نیروهای پیستون و شاتون استفاده میشود وزنههای تعادل در مقابل لنگها قرار میگیرند.
انواع میل لنگ
میل لنگها را میتوان براساس تعداد لنگهایشان یا محورهای اصلی و غیره طبقه بندی کرد اما اصولا برای میل لنگها طبقه بندی خاصی وجود ندارد و تفاوتهای آنان و به نحوه استفاده و هدف از ساخت آنها بر میگردد آنچنانکه اندازه میل لنگ ، تعداد محورهای اصلی، تعدا لنگها و طرز قرار گرفتن لنگها بر روی میل لنگ همگی به نوع ، اندازه و دور موتور ، موتور مورد نظر بستگی دارد.
سایر متعلقات
به قسمت جلو میل لنگ چرخ دندهای متصل است که معمولا چرخ دنده ، میل بادامک و یا سایر چرخ دندههای مورد لزوم را به حرکت در میآورد. در جلو این چرخ دنده یک پولی قرار میگیرد که برای به حرکت در آوردن ژنراتور(یا آلترناتور) و پمپ آب مورد استفاده قرار میگیرد. و در انتهای پشتی میل لنگ صفحهای وجود دارد که فلایویل را بوسیله پیچ بر روی آن نصب میکنند.
فلایول:

فلایویل از ساخمان بسیار سادهای برخوردار است. در واقع ویژگیهای فلایویل در این خلاصه میباشد که این قطعه میبایست متقارن باشد و در عین حال نیز جرم نسبتا زیادی داشته باشد. ابعاد ، اندازه و شکل فلایویلها با توجه به نوع و اندازه و تعداد سیلندرهای موتور متفاوت است.
تعریف
فلایویل یک قرص گردان سنگین است که به عنوان یک ذخیره کننده گشتاور زاویه ای به کار می رود. فلایویل هادر مقابل تغییر سرعت دورانشان مقاومت می کنند، که در نتیجه هنگامی که یک گشتاور نامنظم به آن اعمال می شود، به یکنواخت نگه داشتن چرخش محور کمک می کند. فلایویل ها همچنین توسط موتورهای کوچک برای ذخیره انرژی در زمان طولانی تر و آزاد کردن آن در زمانی کوتاهتر به کار میروند. با این کار در یک دوره کوتاهقدرت را افزایش می دهند.
ریشه لغوی
فلایویل یک کلمه انگلیسی است که خود از کلمه تشکیل شده است (Fly –Wheel) که در آن Fly به معنیپرواز کردن و Wheel به معنای چرخ است. لیکن این کلمه بصورت سر هم Flywheel برای بیان یکی از قطعات موتور که به میل لنگ متصل است بکار برده میشود. البته معادل فارسی نیز برای این واژه موجود میباشد کهعبارتند از: چرخ طیار و چرخ لنگر ، لیکن استفاده از خود کلمه فلایویل رایجتر است.
ساختمان فلایویل
- چرخ لنگر یا همان فلایویل در موتورهای مختلف دارای اندازههای مختلف میباشد. لیکن در مواد ساختمانی آن معمولا از چدن استفاده میکند. ساختمان فلایویل بسیار ساده است و کافی است که تا حد قابل قبولی صاف و صیقلی بوده و در ضمن از لحاظ تعادل در وضعیت خوبی باشد. یعنی انحنا یا وجود تابخوردگی در آن به چشم نخورد.
- اندازه فلایویل یا همان چرخ طیار بستگی به تعداد سیلندرهای موتور و نوع و اندازه موتور دارد و متغیر میباشد بدین ترتین که هرچه تعدا سیلندرها بیشتر باشد (در حالیکه حجم جابجایی کل در موتور با یکدیگر مساوی باشد)، فلایویل میتواند اندازه کوچکتر داشته باشد. (حجم جابجایی کل برای یک موتور عبارتست از حجم جابجایی یک سیلندر ضربدر تعداد سیلندرهای آن موتور). این بدان علت است که فواصل میان احتراقها کمتر میشود. و در نتیجه نیروهای وارده بر میل لنگ بصورت یکنواختتر اعمال میگردد و وظیفه فلایویل به عنوان یک ذخیره کننده انرژی کاهش مییابد.
طرز کار فلایویل

فلایویل یک قطعه سنگین است که بوسیله پیچ و مهره به میل لنگ متصل میشود و وظایف آن عبارتست از :
- ذخیره انرژی برای برقراری سرعت در زمانهای که احتراقی وجود ندارد.
- یکنواخت نمودن سرعت میل لنگ
- انتقال قدرت از موتور به ماشین به عنوان یکی از سطوح محرک صفحه کلاچ
اعمال انجام شده در فلایویل را میتوان با استفاده از انرژی جنبشی تشریح کرد. بدین سان که همانگونه که میدانید انرژی جنبشی یک جسم با جرم جسم و نیز با سرعت آن در ارتباط است. فلایویل از خود دارای یک جرم میباشد که بوسیله میل لنگ چرخانده میشود. در اثر این چرخش فلایویل یک انرژی جنبشی بدست میآورد. حال اگر به نیروی محرکه میل لنگ را از فلایویل جدا کنیم، خواهید دید که فلایویل تا یک مدت زمان کوتاه پس از آن به حرکت خود ادامه میدهد که به علت اینرسی حرکتی فلایویل میباشد. این انرژی در واقع انرژیی است که در جرم فلایویل ذخیره شده است و در زمان قطع نیروی محرکه آزاد میگردد.فلایویل در زمانی که بر روی میل لنگ است دقیقا این کارها را انجام میدهد. یعنی زمانی که در سیلندر ، پیستون به دلیل انفجار سوخت پایین میآید، فلایویل با چرخش میل لنگ به چرخش در آمده و در واقع انرژی ذخیره میکند. فلایویل این انرژی ذخیره شده را در زمانهای دیگر سیکل موتور (مانند تنفس ، تراکم و تخلیه) به میل لنگ و از آنجا به پیستون پسمیدهد. یعنی در واقع در زمانهایی که در موتور احتراقی انجام نمیشود انرژی جنبشی موتور را فلایویل تامین میکند. از آنجایی که در موتورهای با سیلندرهای بیشتر تعداد انفجارهای سوخت در واحد زمان بیشتر است. لذا زمان کمتری موتور برای تامین انرژی جنبشی خود به فلایویل متکی است. به همین خاطر در موتورهای با تعداد سیلندر بیشتر به فلایویلهای کوچکتری نیاز است.
سایر متعلقات
بر روی قطر خارجی چرخ لنگر معمولا یک چرخ دنده دایرهای شکل سوار میشود که (دنده فلایویل) در زمانروشن کردن موتور بکار میآید. بدین شکل که در این زمان چرخ دنده محرک استارت موتور بطور اتوماتیک با دنده فلایویل درگیر شده و باعث حرکت و چرخش موتور میشود.
میل گاردان:

وظیفه میل گاردان انتقال گشتاور پیچشی گیربکس به دیفرانسیل بوده میل گاردان در خودروهای
که چرخ های محرک در جلو وجود دارد به کار نمیرود میل گاردان نیروی پیچشی زیادی تحمل میکند
بر طبق قرار داد اکثر اتومبیل های که شامل دستگاه تولید نیرو و دستگاه انتقال قدرت و دستگاه
کلاچ در جلو می باشند ولی دستگاه محرک واقعی خودرو در عقب واقع است و برای انتقال نیرو
به دستگاه محرک در عقب اجزای مخصوصی لازم است که این کار را انجام می دهند که در مهندسی
اتومبیل "محور حرکت " نامیده می شود.
۱- قفل های میل گاردان:
قفل های میل گاردان برای این منظور به کار می رود که انتقال نیرو را با سرعت زاویه ای ثابتی انجام
دهند . قفل گاردان سبب ارتباط محورها به طور قابل انعطاف می شوند تا اجازه انتقال نیرو در وقتی
که زاویه های بین محورها تغییر پیدا کرد را بدهند خرابی جاده و قابلیت انعطاف میله های معلق به
ندرت امکان هم محور بودن قفل گاردان وجود دارد یک قفل گاردان نیز ممکن است بین محور زنده و
دوک چرخ جلو (پلوس) وجود داشته باشد که می تواند نیرو را به چرخ ها منتقل کند قفل گاردان شامل
اجزای زیر است .
مفصل هوک : قفل گاردانی که خیلی متداول است به نام مفصل هوک نامیده می شود این قفل
اولین مورد استعمال در محورهای حرکت خودرو بوده است و متداول بوده است به طور زوجی مورد
استفاده واقع می شوند به علت این که در مورد چرخ های جلو محرک باشند به کار بردن مفصل
هوک حجم زیادی را اشغال خواهد کرد در این مورد مفصل مخصوص سرعت ثابت که کوچکتر است
به کار می برند .
مفصل مخصوص سرعت ثابت : این مفصل خیلی متداول است چون اجزای ارتعاش به چرخ ها
می دهد مفصل مخصوص حرکت زاویه ای عضو محرک را طوری جهت می دهد که عضو به حرکت
دراورنده دارای همان سرعتی باشد که عضو محرک دارد
2- میل گاردان:
میل گاردان برای این در اتومبیل به کار میرود که گشتاور را از فاصله بین دستگاه انتقال نیرو به
گردانده نهایی منتقل کند.
3- اتصال کشویی میل گاردان:
چون چرخ های عقب در ضمن عبور از چاله ها دارای حرکت عمودی می شوند لازم و ضروری است
که وسیله ای برای تغییر دادن طول به میل گاردان در هنگام تغییر وضع چرخ ها وجود داشته باشد این
عمل به وسیله اتصال کشویی انجام می شود حال که به طور خلاصه عملکرد هر یک از اجزای فوق
را درک کردید به بررسی کلی هر یک از انها می پردازیم.
توضیحات جامع در مورد میل گاردان:
میل گاردان میله ای فولادی تا اندازه ای قطور و بسیار محکم و کاملا صاف و راست می باشد که
نیروی گیربکس را به دیفرانسیل منتقل می کند چون گیربکس با دیفرانسیل فاصله دارد و از طرف
دیگر در یک سطح مساوی قرار ندارند با بالا و پایین رفتن چرخ های عقب .دیفرانسیل هم بالا و پایین
میرود به همین جهت و برای این که اسیبی به میل گاردان نرسد در دو سر میل گاردان دو عدد چهار
شاخه که یک سر ان به شفت گیربکس و سر دیگر ان به دنده پیستون دیفرانسیل وصل شده که این
مجموعه را میل گاردان و قفل های گاردان می گویند .
میل گاردان ممکن است توپر یا تو خالی ساخته شده باشند نوع تو خالی برای موتورهای با کارکرد
سنگین ارجعیت دارد چون وزن کمتری دارند و در نتیجه دارای قدرت انتقال گشتاور بیشتری میباشند
میله های تو خالی معمولا از لوله درزدار ساخته می شوند لوله ها که از ورقه های فولاد کم ذغال
تهیه می شوند به وسیله الکتریکی یا گاز جوش داده می شوند ایجاد صدا در زیر میل گاردان به
خصوص زمانی که گاز را کم می کنیم و یا که به طور ناگهانی روی پدال فشار می دهیم دلیل ان این
است که از ناحیه چهار شاخه لقی به وجود امده است به سبب این که موارد فوق و سایر معایب کم
تر شود و برای این که از نیروی گریز از مرکز میل گاردان به موقع گردش جلوگیری شود و سعی شده
است که در حد امکان میل گاردان را کوتاه تر بسازند .
یک مزیت عالی کوتاه بودن میل گاردان این است که از نیروی موتور کاسته نمی شود و به طور کامل
به دیفرانسیل منتق می گردد و اتومبیل دارای قدرت بیشتری می باشد به همین دلیل در بسیاری
از اتومبیل ها دیفرانسیل را در جلو قرار می دهند و البته در بسیاری دیگر اتومبیل ها دارای دو
دیفرانسیل می باشند مثل اتومبیل جیپ . خرابی قفل گاردان گیر کردن کشویی گاردان خوردگی
بلبرینگ های چهار شاخه گاردان, تعویض دنده معکوس در دور زیاد و فشار اوردن به اتومبیل در جایی
که بکسواد می کند موجب بردین میل گاردان می شود.
میل گاردان و چهار شاخه های ان:
نیروی موتور از طریق گیربکس توسط میل گاردان به دیفرانسیل منتقل می شود در ضمن به خاطر
حرکت به عقب به سمت بالا و پایین بعلت فنربندی و پستی و بلندی جاده و لرزش اتومبیل و تغییر
فاصله بین گیربکس و دیفرانسیل در دو انتهای میل گاردان از چهار شاخه و کشویی گاردان استفاده
می شود میل گاردان به صورت میله توخالی ساخته و سپس بالانس کرده و مورد استفاده قرار
می گیرد قسمت کشویی گاردان به وسیله روغن گیربکس روغن کاری شده و کاسه وچهار شاخه
را هنگام نصب از گیربکس پر می کند و در مواردی از گیربکس خور استفاده می شود
انواع میل گاردان:.
میل گاردان را به صورت یک تکه و دو تکه می سازند در اتومبیل هایی که فاصله بین گیربکس
و موتور حداکثر 5/ 1 متر باشد از گاردان یک تکه و بیش از این فاصله از گاردان دو تکه استفاده
می شود چون اگر طول گاردان یک تکه زیاد بلند باشد در سرعت زیاد دچار اشکال می شود به
همین دلیل از نوع دو تکه استفاده می کنند در میل گاردان دو تکه علاوه بر داشتن چهار شاخه
در سر و ته ان و کشویی در جلو در ناحیه وسط دارای بلبرینگ و لاستیک ضربه گیر می باشد.
معایب میل گاردان :
خرابی و سائیدگی کاسه ساچمه چهار شاخه:
هنگام حرکت اولیه و رها کردن کلاچ ایجاد تقه می کند و در سرعت زیاد اتاق اتومبیل را به لرزش در
می اورد.
خرابی و سائیدگی کشویی گاردان:
هنگام حرکت اتومبیل تولید صدا و هنگام حرکت تولید تقه می کند معمولا میل گاردان نیازی به
بازرسی و نگهداری به خصوص ندارد و فقط هر چند وقت یک بار باید چهار شاخه گاردان را مورد
بررسی قرار داد.
کشویی گاردان:
حرکت اکسل روی فنرها به طور مداوم فاصله بین جعبه دنده و دیفرانسیل را کم می کند بنابراین
محور گاردان نیز باید طول خود را کاهش دهد این عمل به وسیله کشویی گاردان امکان پذیر است
در ضمن کشویی گاردان در هر 5000 کیلومتر بهتر است گریس کاری شود.
هزار خار:
در اتومبیل های اکسل جلو یا اتومبیل های موتور عقب و اکسل عقب گاردان به کار نرفته است
و نیروی محرکه از جعبه دنده و دیفرانسیل به چرخ ها منتقل می شود و نیم شفت ها به چهار شاخ
مجهزند و به وسیله اتصال های کشویی (هزار خار) به دیفرانسیل متصل هستند گرفتن ضربه های
شدید در اکسل جلو یا عقب هنگامی که اتومبیل موتور جلو با اکسل عقب حرکت در میاید ضربه
وارده به جعبه دنده به وسیله محور گاردان بلند گرفته می شود بدین ترتیب کمی پیچیده و دوباره
به جای اول خود باز می گردد در اتومبیل ای اکسل جلو با موتور و اکسل عقب نیم شفت ها که نیروی
محرکه را انتقال می دهند برای پیچیدگی خیلی کوتاه هستند در اینجا عمل ضربه گیر به وسیله چهار
شاخ متصل می شود این بوش ها عمل ضربه گیری را انجام می دهند .
یاتاقان:
یاتاقان ها تکیه گاه اصلی اجزای چرخنده پمپ بوده ومعیوب شدن آنها ممکن است موقعیت اجزاء چرخشی پمپ را تغییر دهد که در این صورت باعث برخورد قطعات ثابت ومتحرک پمپ می شود معیوب شدن کلی یاتاقان ها ممکن است موجب خم شدن محور پمپ شود و در نهایت موجب شکستگی محور شود و در سایر موارد باعث داغ شدن موضعی قطعات پمپ شود .
یاتاقانهای لغزشی : این یاتاقانها برای تکیه نمودن وحفظ کردن اجزاء چرخشی در هر دو جهت شعاعی و محوری بکار می روند محافظ شعاعی معمولا شامل پوستهای سیلندر شکل از مواد و ابعاد مناسب می باشد که در محفظه صلب نصب وثابت شده اند.محافظ محوری معمولا ریگهای صلبی است که در محفظه یاتاقان نسب شده اند و بوشهای متحریکی را بصورت سفت ومحکم به اجزاءچرخشی سوار شده ، تحمل می کند گاهی اوقات این بوشها را بصورت کروییا مخروطی می سازند تا محافظت محوری و شعاعی را مهیا سازند .
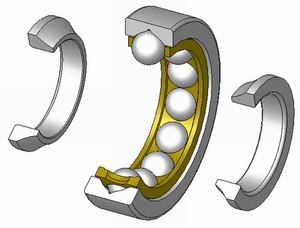
یاتاقانهای غلتشی : یاتاقانهای غلتشی در واقعه شامل دو عدد ریگ یا حلقه و یک سری ساچمه هستند که بصورت مماس و به اندازهبین حلقه ها قرار گرفته اند ساچمه ها توسط قفسی که از صفحات موازی برنجی پلاستیکی یا هر ماده مناسب دیگر ساخته شده اند جدا از هم نگه داشته می شوند .
یاتاقان به دو نیمدایره از جنس بوبیت گفته میشود که درموتور خودروها نصب میشود.
یاتاقان در جایی که دسته ی پیستون ها بر روی میل لنگ نصب میشود قرار دارد.
انواع یاتاقان در صنعت:
یاتاقان ساچمهای (Ball bearing)
یاتاقان کفگرد (Thrust Bearing)
یاتاقان هادی (Guide Bearing)
مزایای عمده یاتاقانهای غلتشی :
مزایای گریس کاری:
معایب گریس کاری:
معایب روغن:
بادامک:

بادامک به جزئی از ماشین گفته میشود که جزء دیگری از آن ماشین را که پیرو نامیده میشود با تماس مستقیم تحت شرایط تعیین کنندهای به حرکت در میآورد.
عضو راننده را بادامک و عضو رانده را پیرو مینامیم. بادامک میتواند دارای حرکتهای دورانی، انتقالی یا نوسانی بوده، و یا حتی ثابت باشد. پیرو نیز به نوبه خود میتواند دارای حرکت دورانی و یا انتقالی باشد.
قابلیت تغییر بادامک بر این اساس است که با تغییر شکل منحنی بادامک تغییری در مشخصهی حرکت پیرو ایجاد میشود. بههمین علت تعداد حرکت-های قابل استفاده پیرو به تنوع و دقت مهندس طراحی بستگی دارد. بادامکهایی را ممکن است طرح کرد که هر حرکتی به پیروش بدهد ولی ممکن است در بعضی از سرعت-های حدی ایجاد شده، شتاب حرکت خیلی زیاد باشد که نتیجه این شتابهای حدی، تنش زیاد ارتعاش سیستم است طراح چنین بدامک و پیرو، حتماً باید متوجه این مؤلفههای شتاب و خواص مادهای که بادامک و پیرو از آن ساخته میشود، باشد تا در مقابل تنشهای شدید و خستگی ناشی از ارتعاش، مقاومت کافی موجود باشد و گرنه فرسایش نسبی افزایش و عمر مکانیزم کاهش خواهد یافت.
انواع پیروها
پیروها را میتوان بر اساس شکل ظاهری آنها، انواع حرکتها انجام شده توسط آنها، و بالاخره موقعیتهای واقعی خط حرکتشان دسته بندی نمود.
شکلهای1و2و3، نشان دهنده پیروهای تیغهای، غلتان و تخت میباشند پیرو تیغهای دارای ساختمان بسیار سادهای میباشد. ولی به خاطر نرخ سایش بسیار زیاد موجود در نقطه تماس، کاربرد زیادی ندارد.
پیرو غلتان نشان داده شده در شکل 2 گونه عملی تری از پیرو تیغهای نشان داده شده در شکل 3 میباشد.
عمل غلتیدن این نوع پیروها در سرعتهای کم، غلتش خالص میباشد. ولی هر چه که سرعت افزایش پیدا عمل غلتش خالص، تبدیل به ترکیبی از اعمال غلتشی و لغزشی میگردد. پیروهای غلتان زمانی بادامک دچار یک خیز ناگهانی و زیاد گردد، ایجاد اشکال مینماید. زیرا در چنین وضعیتی پیرو غلتان، بادامک خود را فشرده میکند.
پیرو تخت نشان داده شده در شکل 1 را میتوان بهینهترین نوع پیروها نامید. این نوع پیروها زمانیکه بادامک دچار یک خیز ناگهانی و زیاد میگرردد، بادامک را فشرده نمیکنند.
پیرو تخت نشان داده شده در شکل 1 در ازای خیز بوجود آمده، باعث تنشهای سطحی و سایش زیاد، مخصوصاً با توجه بهمیزان تغییر مکان و نامیزانی موجود میگردد که بدین علت، عموماً از پیروهای تخت نشان داده شده در شکل1 استفاده میگردد.
حرکتهای متداول پیرو
اولین اقدام در طرح منحنی یک بادامک، رسم دیاگرام تغییر مکان است. لازم است تغییر مکان پیرو بهصورت تابعی از زاویه دوران بادامک تعیین گردد. این تابع ممکن است شکل خاصی داشته باشد یا امکان دارد غیرمشخص باشد. پروفیل یک بادامک معمولاً بهکمک منحنی جابجایی پیرو آن یکسری پارامترهای مربوط به مکانیزم مورد نظر رسم میشود. برای اینکه پیرو با حرکتی که از بادامک میگیرد، کار مورد انتظار را انجام دهد از منحنیهای مختلفی برای دیاگرام جابجایی آن استفاده میشود. چند نوع از حرکتهای متداول پیرو عبارتند از:
1. حرکت با شتاب ثابت
2. حرکت با سرعت ترمیم شده
3. حرکت نوسانی ساده(هارمونیک)
4. حرکت سیکلوئیدی
انواع دیگر حرکتهای پیرو عبارتند از:
حرکت بیضوی، منحنیهای چند جملهای از درجه پنج، حرکت درجه هشت و ...
پس از آنکه منحنی جابجایی پیرو مشخص گردید، میبایست پروفیل بادامک مربوطه را که قرار است منحنی مزبور را تامین نماید، طراحی نمود.
انواع بادامکها :
بعضی از انواع متداول بادامکها عبارتند از:
1. بادامکهای دیسکی
2. بادامکهای انتقالی
3. بادامکهای استوانهای
بادامکهای دیسکی معمولاً با سرعت ثابت دوران میکنند و مسائل فنی زیادی را میتوان با بادامکهای دیسکی حل و بحث کرد و از نظر ساخت سادهترین نوع بادامکها بوده و در عین حال موارد استفاده زیادی دارند.
بادامکها را میتوان به سه نوع مختلف دسته بندی نمود:
1. براساس شکل ظاهری آنها
2. براساس نمودار حرکت پیرو آنها
3. براساس نوع قیود موجود در پیروی آنها
بادامکها را از روی شکل ظاهریشان نیز میتوان دسته بندی کرد. شکل یک بادامک میتواند بهصورتهای:
گوهای، استوانهای، مارپیچ، مخروطی، کروی، گوی سان، شعاعی، مزدوج، و یا سه بعدی باشد.
بادامک میتواند دارای هر یک از حرکتهای دورانی و یا انتقالی باشد. بادامکهای گوهای شامل پیرو انتقالی و نوسانی میباشند.
طراحی بادامک گوهای بسیار ساده است. پیرو چنین بادامکهایی میبایست بهطور دائم، با بادامک در تماس باشد، که این عمل را میتوان به-وسیله یک فنر پیش بار گذاری شده، یا ایجاد حرکت مثبت درون شیاری برای پیرو مهیا نمود.
در بادامکهای شعاعی یا دیسکی، پیرو دارای حرکت شعاعی از مرکز دوران بادامک است.
پیروها بهوسیله فنرهای پیش گذاری شده با بادامکهایش در تماس میباشند. بادامک های صفحه ای یا دیسکی بخاطر سادگی و حجم کم بسیار متداول میباشند.
بادامک مزدوج دارای یک زوج بادامک دیسکی میباشد که بهطور پیوسته با یک پیرو در تماس میباشند. بادامکهای مزدوج زمانی مورد استفاده قرار میگیرند که هدف داشتن:
1. سرعتهای بالا،
2. بارهای دینامیکی زیاد،
3. سر و صدای کم،
4. سایش کم،
5. و بالاخره قابلیت کنترل بالای پیرو باشد.
بادامک مارپیچ وار، گونهای از بادامک تخت با شیار مارپیچ میباشد که قادر به کنترل حرکت نوسانی و یا انتقالی پیرو نظیرش میباشد. کاربرد این نوع بادامک، بخاطر آن که بادامک میبایست دورانی در خلاف جهت حرکتش برای قرار دادن پیرو در موقعیت اولیهاش داشته باشد، محدود میباشد.
بادامک گویسان یا بشکهای حرکت پیرو توسط شیار محیطی بریده شده بر روی سطح بادامک ایجاد میگردد.
بهطور کلی دو نوع بادامک گویسان (بشکهای) وجود دارد، که هر نوع توسط سطح بادامک مشخص میشود. سطوح مورد نظر میتوانند محدب یا مقعر باشند. بادامک گویسان زمانی مورد استفاده قرار میگیرد که زاویه نوسان پیرو زیاد باشد. بخاطر شیار موجود روی سطح بادامک، کاربرد این نوع بادامکها تنها محدود به سرعتهای ملایم میباشند.
بادامک بشکهای، را اغلب بادامک استوانهای نیز مینامند. این نوع بادامک دارای شیار محیطی بریده شده در روی استوانه میباشد(بادامک حول محور استوانه دوران مینماید). بهطور کلی دو نوع بادامک بشکهای داریم. نوع بادامک توسط نحوهای که حرکت به پیرو منتقل میگردد، تعیین میگردد.
بادامک استوانهای شیاری، این نوع بادامک قادر به پذیرفتن حرکت مثبت میباشد.
پیرو این بادامکها دارای یک فنر پیشبار گذاری شده است.
بادامک مخروطی: پیرو این نوع بادامکها، مختصری در امتداد خط مولد مخروط حرکت میکند. بادامکهای مخروطی بخاطر داشتن هزینه زیاد ساخت، استعمال زیادی ندارد.
بادامک کروی، این بادامک از یک سطح کروی که حرکت را به پیرو نظیرش انتقال میدهد تشکیل شده است. پیرو حول محوری که عمود بر دوران بادامک میباشد، نوسان میکند. بادامکهای کروی نیز همانند بادامکهای مخروطی بخاطر داشتن هزینه زیاد ساخت، کمتر مورد استفاده قرار میگیرند.
فایده استفاده از بادامک کروی نسبت به بادامک دیسکی در این است که در بادامکهای کروی، امکان بدست آوردن حرکت نوسانی، حول محوری که با محور دوران بادامک موازی نباشد نیز وجود دارد.
سیلندر:

ریشه لغوی
کلمه سیلندر (Cylinder) یک کلمه انگلیسی است که به شکل دست نخورده در زبان فارسی استعمال میشود. معنای اصلی سیلندر «استوانه» میباشد.
دید کلی
سیلندر موتور به قسمت استوانهای شکل موتور گفته میشود که قطعات دیگر نظیر پیستون درون آن قرار گرفته و بالا و پایین میروند. شکل کلی سلندرها یک استوانهای است که از هر دو طرف باز است. به عنوان مثال اگر قسمت تحتانی یک لیوان را از جایی ببریم که قطر آن با قطر دهانه لیوان یکسان باشد یک سیلندر ساختهایم. سیلندر موتور در تمامی موتورهای احتراق داخلی (خواه چهارزمانه باشد خواه دوزمانه) وجود دارد.لیکن شکل آنمتناسب با نوع موتور متفاوت است. همچنین ابعاد سیلندر نیز متناسب با توان اسمی موتور و تعداد سیلندرهای آن متفاوت است. در معنای کاربردی کلمه سیلندر نه تنها به یک استوانه توخالی بلکه به بدنه اصلی موتور گفته میشود که شامل سیلندرها و نیز پوسته پوشاننده اطراف آنها مجاور عبور آب برای خنک کاری سیلندر و نیز مجاری روغن گفته میشود. سیلندر قسمت اصلی یک موتور است و سایر قسمتهای موتور به آن وصلمیشوند.
تاریخچه
اصولا هر موتور احتراقی برای تبدیل انرژی سوخت به انرژی مکانیکی حداقل به یک سیلندر نیاز دارد (اعم ازموتورهای احتراق داخلی یا موتورهای احتراق خارجی) حتی قبل از سال 1700 میلادی موتورهایی ساخته شده بودند که دارای سیلندر بودند. لیکن اولین کاربرد واقعی و عملی سیلندر با اختراع اولین موتور بخار توسط جیمز وات در سال 1769 اتفاق افتاد. وی یک موتور بخار ساخته بود که از یک سیلندر و یک پیستون و یک چرخ طیار تشکیل شده بود. از آن تاریخ تا به امروز هر موتور احتراقی که ساخته شده است. در ساختمان خود قسمتسیلندر را داشته است. لیکن شکل ، اندازه ، نحوه قرارگیری و آرایش سیلندرها و تعداد آنها در بلوک سیلندر با توجه به قدرت مورد نیاز و اندازه موتور متفاوت بوده است.
تقسیمات و انواع سیلندر
همانطور که ذکر شد سیلندرها دارای طیف وسیعی از اندازه و تعداد میباشند. لیکن تقسیمبندی سیلندرها را میتوان بر اساس نحوه ساخت و ریخت داخلی آنها انجام داد. چرا که هر گروه از سیلندرها در ابعاد و تعداد مختلف ساخته میشوند. بدنه موتورها یا همان بلوک سیلندر معمولا به شکل ریختهگری و از جنس چدن یا آلیاژ آلومینیم میسازند. در حین ساخت این قطعه ریختهگری مجاری عبور آب را نیز در درون آن تعبیه میکنند. پس از تولید بدنه مجاری عبور روغن از طریق سوراخکاری در بدنه بلوک سیلندر ایجاد میشوند. البته ممکن است این مجاری نیز در مرحله ریختهگری تعبیه شوند. برای سیلندرهایی که پیستون درون آنها حرکت میکند میتوان یکی از ساختارهای زیر را بکار برد.
- بلوک یکجا :در موتور اکثر وسایل نقلیه از آرایش بلوک یکجا استفاده میشود. که در آن سیلندرها مستقیما در بدنه بلوک سیلندر ریختهگری میشوند.
ساختار
سیلندرها استوانههای توخالی هستند که محل بالا و پایین رفتن پیستون میباشند. لیکن چگونگی و کیفیت سطح داخلی سیلندرها که در تماس با پیستون است بسیار مهم است. دیوارههای چدنی یا آلو مینیمی سیلندرها به منظور فراهم آوردن یک سطح صاف برای حرکت پیستونها باید صیقل زده شود. صیقلی بودن سطح داخلی سیلندرها به خاطر کم کردن اصطکاک میان پیستون و جداره سیلندر است. البته بدیهی است که اصطکاک باعث تولید حرارت اضافی و هدر رفتن انرژی میشود که میبایست تا حدامکان از آن جلوگیری کرد. برای این منظور از روغن نیز استفاده میشود. سیلندرها و بوشها دارای سطح پرداخت شدهای (صیقل خورده) میباشند که دارای هاشورهای (شیارهای) بسیار کوچکی است که به شکل متقاطع و در حین حرکت بالا و پایین سنگ سمباده در درون سیلندر ایجاد شده است. این هاشورهای متقاطع از گیر کردن رینگهای پیستون جلوگیری کرده و در ضمن سطحی را برای نگهداری روغن روانساز فراهم میآورند.
کاربردها
همانگونه که گفته شد، سیلندر موتور جزیره لاینفک موتورهای احتراقی میباشد. چنانچه ساختار سیلندر به شکل امروزی مورد استفاده ، وجود نداشت. استفاده از موتورهای احتراقی تولید کننده توان ، عملا غیر ممکن بود.
سر سیلندر:

در یک موتور درونسوز سرسیلندر به قطعهای گفته میشود که بر فراز بخش بالایی سیلندرها قرار دارد.
چنانچه بلوک سیلندر یک موتور را به تنهایی دیده باشید. متوجه شدهاید که قسمت فوقانی آن باز بوده و پیستونها در درون سیلندرها قابل دیدن هستند. در ضمن سوراخهایی در بدنه موتور وجود دارد (بدنه موتورهای بلوک سیلندر است) که انتهای آنها باز است. برای تکمیل شدن ساختار بلوک سیلندر به سرسیلندر نیاز است.
اتاقک درونسوزی
که عمل تراکم مخلوط هوا و سوخت و نیز عمل انفجار این مخلوط در آنجا صورت میگیرد، نیز در بدنه سرسیلندر تعبیه شده است که از لحاظ شکل و ابعاد دارای گونههای فراوانی است. ناگفته نماند که سرسیلندر در زیر یک درپوش محفوظ است.
طرز کار
قطعات عمده سرسیلندر که تحرک دارند همان سوپاپهای سرسیلندر است که میبایست بصورت بسیار دقیق و متناسب با حرکات پیستون باز و بسته شوند. عمل باز و بسته شدن این سوپاپها و نیز زمان بندی آن (تعیین مدت زمان بسته بودن یا باز بودن سوپاپها) بهوسیله میل بادامک انجام میپذیرد. قسمتهای دیگر سرسیلندر که فاقد تحرک هستند کافیست که در برابر حرارتهای بالای ایجاد شده در اثر احتراق و نیز در برابر شوکهای بوجود آمده در اثر انفجار سوخت پایداری داشته باشند. و البته باز بودن مجاری عبور آب و روغن نیز ضروری است.
کاربرد
سرسیلندرها تنها در موتورهای احتراق داخلی چهارزمانه وجود دارند و علت استفاده از آنها این است که اگر به علت خرابی نیاز باشد که سیلندرها یا پیستونها دستکاری شوند، یا برداشته شوند، با باز کردن سرسیلندر دسترسی به آنها بسیار سادهتر خواهد بود.
شاتون:

مقدمه
در موتورهای پیستونی ، خواه دوزمانه باشند، خواه چهارزمانه ، پیستون تنها در مرحله احتراق سوخت جهت حرکت خود انرژی دارد و در مراحل دیگر (از قبیل تنفس ، تراکم و تخلیه) میبایست به نحوی حرکت داده شود. برای تامین حرکت پیستون در زمانهای که احتراقی در سیلندر صورت نمیگیرد از میل لنگ استفاده میکنند.

البته اینکه خود میل لنگ حرکتش را از کجا میآورد، بدیهی است که حرکت میل لنگ نیز از احتراق سوخت است اما ساختمان و شکل کلی میل سنگ به گونهای است که در موتورهای چند سیلندر در هر زمان توسط یکی از پیستونها تحت فشار قرار میگیرد و همواره دارای انرژی جنبشی است که با استفاده از این انرژی پیستونها دیگر را که در مراحلی نیز از مرحله احتراق هستند، به حرکت در می آورد. در موتورهای تک سیلندر نیز برای تامین حرکت پیستون در زمانهای غیر از زمان قدرت (زمان احتراق سوخت) از یک چرخ لنگر (فلایویل) که به میل لنگ متصل است استفاده میشود.
در این حالت انرژی آزاد شده در مرحله قدرت در فلایویل ذخیره میشود و در زمانهای که انفجاری در سیلندر اتفاق نمیافتد آزاد میگردد. برای آنکه ارتباط میان میل لنگ و پیستونها برقرار گردد از شاتون یا دسته پیستون استفاده میشود. البته شاتون در حالت عکس نیز عمل میکند. بدین معنا که زمانی که سوخت متراکم شده در اتاقک احتراق منفجر میشود. انرژی ذخیره شده در آن به یکباره آزاد میشود که باعث وارد آمدن یک ضربه به پیستون میگردد. که باعث پایین راندن پیستون میشود چنانچه بخواهیم که این حرکت پیستون را به میل لنگ منتقل کنیم. میبایست از شاتون استفاده کنیم.
ساختمان شاتون
شاتون قطعهای است که پیستون را به میل لنگ متصل میکند. این قطعه تا حد امکان سبک ساخته میشود. ولی در عین حال به اندازه لازم سخت و محکم میباشد. برای تامین شرایط فوق معمولا شاتون را از جنس فولاد میسازند این استحکام برای شاتون ضروری است چرا که میبایست ضربات ناشی از احتراق ا تحمل کند (نیرویی که در زمان قدرت روی پیستون وارد میشود،) بوسیله شاتون به میل لنگ منتقل میگردد.
اجزای شاتون
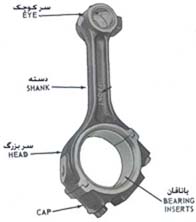
- شاتون دارای دو سر و یک ساقه میباشد. چنانچه مقطع عرضی ساقه شاتون را در نظر بگیریم به شکل حرف (I) در زبان انگلیسی میباشد. یعنی در میان فرو رفته و در کنارهها برجسته میباشد (اگر از روبرو به یک تیر آهن که به حالت افقی قرار گرفته است نگاه کنید، میتوانید بصورت تقریبی سطح مقطع ساقه شاتون را ببینید.).
- سرهای شاتون با یکدیگر اختلاف اندازه دارند، بدین شکل که شاتون دارای یک سر کوچک در بالا (جایی که به پیستون متصل میشود) و یک سر بزرگ در پایین (محل اتصال شاتون به میل سنگ) میباشد. سر کوچک شاتون به صورت یکپارچه است. لیکن سر بزرگ آن بصورت دو تکه ساخته میشود که با کمک پیچ و مهره به هم متصل میشوند.
- سر کوچک شاتون تشکیل یک یاتاقان را میدهد که انگشتی پیستون از داخل آن میگذرد در داخل این یاتاقان معمولا یک (بوش به آستریهای قابل تعویض گفته میشود که در سطوح داخلی در معرض سایش نصب میشوند) از جنس مس یا برنج قرار میدهند که در تماس با پین پیستون میباشد.
- سر بزرگ شاتون به شکل یک یاتاقان دو تکه است که متحرک نیز میباشد (یعنی لنگ میل لنگ در داخل این یاتاقان دارای چرخش میباشد) و لنگ میل لنگ را در بر میگیرد. نیمه بالایی این یاتاقان با ساقه شاتون به شکل یکپارچه ریخته گری میشود. و نیمه پایینی آن که کپه یاتاقان خوانده میشود بوسیله دو عدد پیچ و مهره به نیمه بالایی متصل میگردد.
- در داخل سر بزرگ شاتون نیز میبایست بوش قرار داده میشود لیکن چون خود یاتاقان شاتون دو تکه است این بوش نیز به صورت دو عدد نیم بوش در داخل نیمه بالایی و نیمه پایینی سر بزرگ شاتون جاگذاری میشوند. این بوش بین لنگ میل لنگ و انتهای بزرگ شاتون قرار میگیرد. و هدف از استفاده از آن کاهش سایش و فرسودگی بر اثر اصطکاک است.
طرز کار شاتون
همانگونه که میدانید در موتورهای پیستونی حرکت ایجاد شده در اثر سوختن ماده سوختنی به شکل بالا و پایین رفتن پیستون میباشد. لیکن ما در استفاده از قدرت موتورها به توان چرخشی نیاز داریم. جهت تبدیل حرکت رفت و برگشتی پیستون به حرکت چرخشی در موتور از شاتون و پس از آن از میل لنگ استفاده میشود.
پیستون:
پیستون اولین قطعه موتور است که شروع به حرکت میکند و انرژی بوجود آمده از احتراق سوخت را به میل لنگ منتقل مینماید.
ریشه لغوی
پیستون شکل دست نخورده کلمه (Piston) است که از زبان انگلیسی به زبان ما وارد شده است و به یکی از قطعات موتور اطلاق میشود.
ساختمان پیستون
پیستونها به شکل یک استوانه توخالی هستند که یک سر آنها بسته و سر دیگرشان باز است که از طریق این سر و بوسیله شاتون به میل لنگ متصل میشود البته معمولا قطر پیستون در سر باز آن بیشتر است. به عنوان یک مثال اگر یک استکان را برگردانید تقریبا شکل کلی یک پیستون را خواهید دید. طول پیستونها معمولا کمی بیشتر از قطرشان است و تا حد امکان سبک ساخته میشوند.پیستونها میبایست دارای استحکام لازم بوده و کیفیت بالایی داشته باشند در ضمن میبایست بتوانند به خوبی حرارت را هدایت کنند. هدایت حرارت در پیستون بسیار حیاتی است زیرا در غیر اینصورت پیستون بسیار داغ شده و خطر چسبیدن آن بر اثر انبساط به جداره سیلندر پیش میآید.
مواد ساختمانی
موادی که برای ساختن پیستونها بکار میروند عبارتند از چدن خاکستری ، فولاد ریخته گری ، و آلیاژ آلومینیوم. از چدن یا فولاد معمولا در ساختار پیستونهای موتورهای سنگین که به سرعت زیاد و شتاب آنی نیاز ندارند استفاده میشود. در اغلب موتورهای اتومبیلها از پیستونهایی استفاده میشود که با آلیاژ آلومینیوم ساخته شدهاند. دلیل این تفاوت اینست که مواد بکار رفته در پیستونهای اتومبیلها با وزن سبکتر خود اجازه کار در سرعتهای بیشتر و انعطاف پذیری در سرعتهای مختلف را به پیستونها میدهند. از طرف دیگر در بعضی از موتورهای سنگین از پیستونهای آلیاژ آلومینیومی به لحاظ داشتن خواص رسانش گرمایی مناسب این ماده استفاده میشود بدین ترتیب که استفاده از آن ، کنترل بهتر حرارت محفظه احتراق را فراهم آورده و بنابراین باعث کنترل بهتر احتراق میگردد. پیستونهای چدنی در مقابل فرسودگی مقاومت بیشتری داشته شی کمتری در داخل سیلندر نسبت به پیستونهای آلومینیومی نیاز دارند (اصطلاح لقی پیستون به فاصله میان پیستون و جداره سیلندر گفته می شود). پیستونها چدنی گاهی اوقات با قلع یا یک فلز مخصوص روکش داده میشوند تا جلای صافتر و مقاومت بهتری در مقابل فرسودگی بوجود آورند.
عیب پیستونهای آلومینیومی
عیب مهم پیستونهای آلیاژ آلومینیومی اینست که دارای ضریب انبساط بالایی میباشند. این بدانمعناست که لقی در این پیستون میبایست اندکی بیشتر از لقی در پیستونهای چدنی باشد، معمولا برای جلوگیری از انبساط پیستونها از روشهای مخصوصی استفاده میشود که در ذیل چهار روش رایج آنها را به اختصار میکنیم.
روش اول
در این روش مقطع بدنه پیستون را به جای آنکه به شکل دایره بسازند. به شکل بیضی عمود بر محور انگشتی پیستون و قطر کوچک آن در جهت انگشتی پیستون باشد.
روش دوم
در این روش برای کنترل کردن انبساط پیستون بر اثر حرارت یک سری شکافهای عمودی و افقی و یا فرو رفتگیهایی در بدنه پیستون ایجاد میگردد.
روش سوم
در این روش برای کنترل انبساط حرارتی پیستون از روش تقویت کردن یا دو فلزی نمودن قسمتی از پیستون که در معرض حرارت بیشتری قرار دارد، استفاده میگردد. بدین ترتیب که در داخل پیستون نواری از فولاد یا یک فلز مخصوص (که فلز غیر قابل تغییر نامیده میشود) قرار میدهند و روی آنها را با ماده اصلی یا آلیاژهای آلومینیوم پوشش میدهند. در بعضی از پیستونها مواد فولادی بصورت حلقهای در موقع ریخته گری داخل پیستون قرار میگیرند.
روش چهارم
در این روش برای جلوگیری از انتقال حرارت سر پیستون (که در مجاورت احتراق سوخت است) به بدنه پیستون ، یک سر حرارتی شامل شیاری است که در نزدیکی سر پیستون و به موازات شیارهای رینگ ایجاد میشود با این عمل تا اندازهای راهی که حرارت را از سر پیستون به بدنه آن منتقل میسازد کمتر میکنند. بنابراین بدنه زیاد گرم نمیشود و انبساط زیادی پیدا نمیکند.
قسمتهای اصلی پیستون
قسمتهای اصلی پیستون عبارتند از سر یا تاج ، شیارهای رینگ ، سطوح پیستون ، بدنه یا دامن و سوراخ انگشتی.
سر یا تاج پیستون
این قسمت سطح بالایی پیستون است معمولا دایرهای شکل است و نیروی تولید شده توسط سوخت مستقیما روی آن وارد میشود سر بعضی از پیستونها خصوصا پیستونهای موتورهای دوزمانه وموتورهای دیزلی فرمدار ساخته میشود.
شیارهای رینگ
شیارهای محل قرار گرفتن رینگها در قسمت بالای پیستون میباشند در هر پیستون معمولا 3تا 5 شیار رینگ وجود دارد. پایینترین شیارها متعلق به رینگهای روغن میباشد و همین دلیل در ته این شیار منافذی برای ورود روغن به داخل پیستون تعبیه شده است.
سطوح پیستونها
تکیه گاهها یا سطوح عبارتست از لبههایی که بین شیارهای رینگ قرار گرفتهاند بگونهای که رینگها را در شیارهای خود نگه داشته و حمایت میکنند.
بدنه یا دامن پیستون
بدنه پیستون به قسمت خارجی آن گفته میشود که در زیر شیارهای رینگ قرار دارد. پیستون توسط بدنه در حالت راست قرار میگیرد.
سوراخ انگشتی
سوراخ انگشتی محلی است که شاتون بوسیله انگشتی به پیستون متصل میگردد. اطراف دو سوراخ انگشتی پیستون (در داخل پیستون) ضخیمتر ساخته شده است تا استقامت این سوراخها افزایش یابد. هر یک از این قسمتها ، برجستگی انگشتی پیستون نامیده میشود.
طرز کار پیستون
همانگونه که ذکر شد پیستون اولین قطعه متحرک موتور است که باعث میشود تا انرژی آزاد شده از احتراق سوخت در دسترس قرار بگیرد. بدین منظور پیستون با حرکات خود ابتدا باعث ورود هوا و یا مخلوط هوا و سوخت به داخل سیلندر میشود (در هنگام حرکت به سمت پایین) ، سپس باعث فشرده شدن مخلوط مذکور میگردد و در ضمن به نحو رضایت بخشی از نشت کردن گازها جلوگیری میکند (در هنگام حرکت رو به بالا) ، پس از عمل احتراق انرژی آزاد شده توسط پیستون جذب شده و با کمک شاتون به میل لنگ منتقل میگردد. و در نهایت پیستون باعث بیرون راندن گازهای ناشی از احتراق از محفظه سیلندر میگردد.
کاربرد ویژه
از پیستون در ساختمان موتورهای احتراق خارجی و موتورهای رفت و برگشتی استفاده میشود.