محققان آمریکایی روبات چهارپایی را رونمایی کردند که میتواند راه برود، از پله بالا برود و تعادل خود را در برابر ضربه حفظ کند. آنها همچنین بر این اساس روبات کاراتهکا را نیز ساختهاند.
به گزارش ایرنا، خبرگزاری یونایتدپرس با انتشار یک فیلم ویدیویی این روبات جدید را که "اسپات" نام دارد، نشان میدهد که فردی به آن لگد میزند اما این روبات تعادل خود را حفظ کرده و به حرکت خود ادامه میدهد.
این روبات همچنین میتواند بر روی تپههای سنگی بالا برود، از آنها پایین بیاید و از پله بالا برود.
در این فیلم ویدیویی نشان داده میشود که این روبات که تنها 72.57 کیلوگرم وزن دارد، میتواند به سرعت حرکت کند.
این روبات با استفاده از یک حسگر که بر روی سر آن قرار دارد، راه خود را در اراضی ناهموار پیدا کرده و راه میرود.
این روبات انرژی خود را از برق تامین و برای حرکت پاهای خود از هیدرولیک استفاده میکند.
اسپات توسط محققان شرکت آمریکایی "بوستون داینامیک" ساخته شده است؛ بوستون داینامیک یک شرکت متعلق به گوگل است که به دلیل ساخت روبات "بیگ داگ" (سگ بزرگ) به وزن 108.86 معروف شده است.
این شرکت همچنین به تازگی از روبات انساننمایی به نام "اطلس" (ATLAS) رونمایی کرده است.
الن استوفان یکی از دانشمندان ارشد ناسا میگوید انسان در آستانه کشف حیات فرازمینی قرار دارد.
براساس گزارش MSNBC، استوفان معتقد است انسان تا 10 ساله دیگر مدارکی قدرتمند از وجود حیات فرازمینی به دست خواهد آورد و شواهد قطعی وجود این حیات را تا 20 یا 30 سال دیگر در اختیار خواهدداشت.
استوفان در جلسهای که موضوع اصلی آن تلاشهای ناسا برای یافتن سیارههای قابل سکونت یا حیات فرازمینی بود گفت ما میدانیم کجا و چگونه جستجو کنیم. در بیشر موارد تکنولوژی مورد نیاز جستجو را نیز در اختیار داریم و در مسیر اجرا و عملیساختن برنامهها قرار گرفتهایم. ما در مسیر درستی حرکت میکنیم.
جان گرانسفلد فضانورد سابق ناسا و قائممقام ماموریتهای علمی ناسا نیز به اندازه استوفان خوشبین است و پیشبینی میکندنشانههای حیات بیگانه به زودی در سامانه خورشیدی و فراتر از آن کشف خواهندشد.
یافتههای جدید نشان میدهند سامانه خورشیدی و کهکشان راه شیری از محیطهایی برخوردارند که میتوانند از حیات،به شکلی که انسان با آن آشنااست، پشتیبانی کند. برای مثال اقیانوسهای آب مایعی که در زیر پوستههای منجمد قمرهای سیاره مشتری،اروپا و گینامد و همچنین قمر سیاره زحل، انسلادوس وجود دارند از جمله چنین محیطهایی هستند. مریخ نیز در دورانهای باستان پوشیده از اقیانوسها بوده و رگههای فصلی تاریکی که امروزه روی سطح مریخ دیده میشوند،زمانی محل جاری شدن آبهای شور بودهاست.
درعین حال مریخنورد کنجکاوی ناسا نیز توانسته مولکولهای کربنی و نیتروژن را در مریخ کشف کند، ترکیباتی که برای ایجاد حیاتی شبیه به حیات زمینی حیاتی هستند.
فراتر از تمامی این کشفیات، اطلاعات به دست آمده از تلسکوپ کپلر ناسا نیز نشان میدهند تقریبا هر ستارهای که در آسمان وجود دارد،میزبان یک سیارهاست و بسیاری از این سیارهها ممکن است قابل سکونت باشند. کپلر نشان دادهاست که فراوانی سیارههای خاکی مانند مریخ و زمین در کهکشان راه شیری بسیار بیشتر از سیارههای گازی مانند زحل و مشتری است.
By combining sheets of graphene with a traditional battery material, scientists have created hybrid supercapacitors that can store as much charge as lead acid batteries but can be recharged in seconds compared with hours for conventional batteries.
Supercapacitors now play an important role in hybrid and electric vehicles, consumer electronics, and military and space applications. However, they are often limited in terms of how much energy they can store.
Now researchers at the University of California, Los Angeles, have developed a hybrid supercapacitor that is based on graphene, which is made of single layers of carbon atoms. Graphene is flexible, transparent, strong and electrically and thermally conductive, qualities that have led to research worldwide into whether the material could find use in advanced circuitry and other devices.
The scientists combined graphene with manganese dioxide, which is widely used in alkaline batteries and is both abundant and environmentally friendly. The manganese dioxide formed microscopic flowers made of flakes only 10 to 20 nanometers thick. The supercapacitors also incorporated electrolytes that can operate at high voltages.
The graphene provides a highly conductive structure for the manganese dioxide that is also very porous, helping ensure that more of the manganese dioxide can undergo electrochemical reactions. The resulting 3-D hybrid supercapacitor has an energy density of up to 42 watt-hours per liter, superior to many commercially available supercapacitors and comparable to lead acid batteries, the researchers said. Furthermore, the new supercapacitors can provide power densities up to roughly 10 kilowatters per liter, which is 100 times faster than high-power lead acid batteries and 1,000 times faster than a lithium thin-film battery. Moreover, the new devices could also retain their energy capacity over a cycle of 10,000 discharges and recharges.
The scientists demonstrated they could integrate their supercapacitor with solar cells for efficient solar energy harvesting and storage. They also noted their supercapacitors can be assembled in air without the need for the expensive dry rooms needed for manufacturing today's supercapacitors. They detailed their findings online March 23 in the journal Proceedings of the National Academy of Sciences.
Photo: Seth Kroll/Wyss InstituteThe self-folding crawling robot in three stages.
At the IEEE International Conference on Robotics and Automation (ICRA) last year, Harvard's Sam Felton introduced us to his printed, self-folding inchworm robot. With some external infrastructure and the addition of a motor, the inchworm could autonomously transform from a flat sheet to a crawling robot by folding itself into a 3D structure with flexible joints.
Today, Felton and colleagues from Harvard and MIT are publishing a new paper in Science featuring a much more complex self-folding robot that can go from flat to folded and walking in four minutes without any human intervention at all.
Let's be clear about what's autonomous here, and what's not: the folding process by which the robot changes from flat to less flat is completely autonomous, and this includes the ability to begin walking on its own, as shown in the video above.
But the layered structure of the robot takes a lot of work to prepare (printing, bonding, laser cutting, and so on), and the motors, batteries, and some electronic components all need to be installed by hand—a series of steps that take almost 2 hours:
That's a very long and complex process [see illustration below], but what's most relevant is to think about how much of it can be made autonomous. The researchers say that "the assembly time could be substantially reduced and completely automated with the use of pick-and-place electrical component assembly machines and automated adhesive dispensers." And if that's the case, we're looking at potentially very cheap, easily mass-produceable robots.
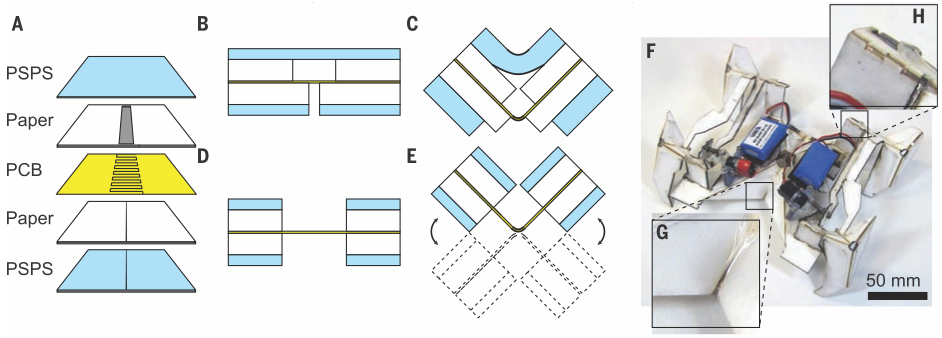
Image: ScienceThe self-folding process with shape-memory composites: (A) The self-folding shape-memory composite consists of five layers: two outer layers of PSPS, two layers of paper, and a layer of polyimide (PCB) bearing a copper circuit in the middle. Cutting a gap into the upper paper layer allows controlled folding of the polyimide, and slits in the bottom layers of paper and PSPS prevent antagonistic forces. (B) A structural hinge, designed to fold once when activated and then become static. (C) When activated, the PSPS on the concave side pulls the two faces together, bending the polyimide along the hinge. (D and E) A dynamic hinge, designed to bend freely and repeatably. (F) A self-folding crawler built with the shape-memory composite. This robot includes both (G) self-folding and (H) dynamic hinges.
The secret sauce that allows this robot to structure itself from a flat piece of cardboard is a very carefully computed folding design, combined with a structure comprised of resistive circuits embedded in a flexible PCB between layers of paper and heat-activated shape-memory polymer (the "PSPS" in the above image). This sandwich is laser cut where the joints will be, and when the embedded resistors heat up, the shape-memory polymer around them contracts.
Depending on where and how the cuts are made, this contraction can result in permanent (when cooled) controlled bending of up to 120 degrees in either direction. Flexible joints (like hinges) come from cutting out both the paper and the PSPS, leaving just the flexible circuit board to connect two structural elements. And by combining flat elements, rigid bends, and flexible joints, you can create complex linkages that can translate (say) the rotary motion from a motor into the cyclical motion of a set of legs. (DASH is an excellent example of this.)
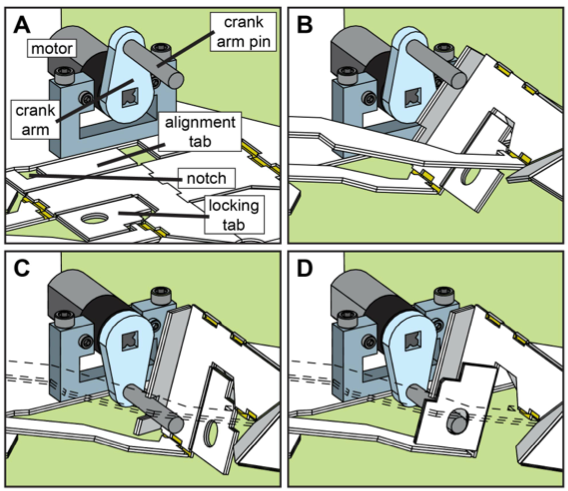
Image: ScienceThe motor and alignment mechanism of the robot: (A) The linkages are fabricated in plane with the composite, and the crank arms are oriented upward. (B) The legs and linkages fold into position, and the alignment tab folds into place. (C) The motor rotates 180°, pushing the crank arm pin into the alignment notch. (D) The locking tab folds over the pin, coupling the pin to the linkage. In (C) and (D) the obscuring linkage is displayed in outline only for clarity.
The really hard part here is the design of the origami structure (which is done by a computer program) and the manufacturing of the composite sheet. Once the composite is completed, the final assembly step just involves attaching the batteries, motors, and microcontroller to the robot using a 3D printed motor mount and some screws. Still, arriving at the right design required over 40 iterations of the robot's structure.
The microcontroller took care of sending current through the series of embedded resistive traces at the right time, to ensure that the folding process took place in the correct order. A particularly clever bit is how the motors attach to the structure of the robot, using tabs that sequentially fold to align the motor and then lock it into place [right].
Overall, creating a structural fold using this technique had a success rate of about 97 percent. The researchers tried to make three robots, and were successful with just one, but that was due to one single hinge not folding with the necessary precision on each of the failures. The robot itself can walk at 5.4 centimeters per second (0.43 body lengths per second) and turn at about 320 degrees per second.
In a very general sense, robots are made of common elements. This paper is demonstrating the autonomous (or potentially autonomous) printing and construction (through folding) of the following:
Rigid structure
Joints and flexible hinges and linkages
Here's what, in this case, had to be manufactured and placed separately:
Sensors and electronics
Motors and actuators
Batteries
In other words, these things are what's keeping this robot from being created and assembled to the point of functionality from just raw materials in a printer. Let's take a look at where we are with this stuff.
Sensors and electronics
At ICRA in June, Felton was second author on a paper about a self-folding printable lamp. What was unique about the lamp is that it included a self-folding printable switch (a contact sensor), along with a printed capacitive touch sensor.
The paper also described a printed velocity sensor. It's possible to print other electronic components (with screen printing techniques), including LEDs, capacitors, and resistors, although printing a microcontroller might still be a bit tricky.
Motors and actuators
The motors used on this particular robot don't lend themselves to be printed or assembled from basic parts, but other kinds of actuators do. One option might be to use shape-memory alloy (SMA) wiring, which shrinks when heated and expands when cooled. The problem with SMAs is that while they contract quickly, it takes a while for them to passively cool, so robots that rely on them tend to be sloooooowwwwww.
They can exert forces of 100 times their own weight, and inflate at something close to the speed of sound. You can work inflation constraints into the design, and the actuators will then curve, twist, contract, or do all of those things at once. By opposing two of these actuators, you could create a rapid back-and-forth motion, which could be used to drive a walking robot.
Another, similar design (also presented at ICRA 2014) are printable "pouch motors" from MIT:
Both of these inflatable actuators still need some kind of pump or a source of high-pressure gas, which brings us to:
Batteries
Autonomous robots need autonomous power. Printable batteriesand supercapacitors have been trying to be a thing for a very, very long time, driven by every single industry that wants cheap, thin, flexible power. The advantage that robots have here is that they can just sit back and wait for consumer tech to evolve, and sooner or later, we'll have a printable battery that works.
In the mean time, there are a few ways that we might be able to power actuators without having to rely on electricity. One particularly awesome way is to use a gas generator, or better yet, a series of small gas generators. This is probably something that could be pre-mixed and printed, and then activated with an embedded resistor. We've seen this applied to explosively jumping microrobots, although for actuation, it might be better to use a mixture that's slightly less, you know, violent:
So what does this all mean? It's unlike us to be optimistic about robots (after writing about them for seven years we're horribly jaded), but there's a realistic path there towards a completely printable, autonomously self-assembling robot. Like, you start with a bunch of raw materials (and probably a series of specialized printers and laser cutters), push a button, wait a while, and then end up with a robot walking out the other end.
We're not there yet, but it's something that we can see being a possibility in the near future, and it's very exciting to think about in terms of everything from low-cost robotic toys to resilient robot swarms for planetary exploration.
By Tanya Lewis, Staff Writer | March 21, 2014 11:39am ET
-
Imagine a day when a form of artificial intelligence could deliver a speech as compelling as one given by a human.
A nonprofit organization called XPRIZE, which designs competitions to encourage the development of innovative technology for the benefit of humanity, announced it will award a prize to anyone who can develop an artificial intelligence, or "AI," that could give an inspiring talk at the TED (Technology, Education, Design) conference without any human assistance.
"Advances in machine learning and artificial intelligence have made extraordinary progress over the past decade, but we've barely scratched the surface," Peter Diamandis, chairman and CEO of XPRIZE, said in a statement. Diamandis and Chris Anderson, curator of TED, announced the prize Thursday (March 20) at the TED2014 Conference in Vancouver, British Columbia.
The prize organizers are requesting input from the public about the talk's topic and length, whether the AI should be a physical robot or a disembodied voice, how the competition should be judged and whether the prize should be awarded to the first team to meet certain criteria or as part of an annual competition. More information is available on the prize's website.
"We're entering a future in which humans and machines must learn new ways to work with each other," Anderson said in a statement. "I predict that within a few years, we'll be blown away by what artificial intelligences can do." [Super-Intelligent Machines: 7 Robotic Futures]
XPRIZE, founded in 1995, organizes high-profile prizes in five areas: learning, exploration, energy and environment, global development, and life sciences.
Current prizes include the $30 million Google Lunar X PRIZE for safely landing a private spacecraft on the moon, the $10 million Qualcomm Tricorder XPRIZE and the $2.25 million Nokia Sensing XCHALLENGE for portable health care sensing, and the $2 million Wendy Schmidt Ocean Health XPRIZE to understand ocean acidification



 -
-